
The death of the conventional gearbox wasn’t a murder – it was a mercy killing. The advent of the modern electric vehicle has allowed automakers to shed what is likely the most mechanically complex, costly, and now unnecessary part of a car. Torque converter? Don’t need it. Valve body? That’s black magic. Synchros? For what? 10 speeds? Sounds expensive.
A lot has been written about the slow death of row-your-own gear manual transmissions. I, too, mourn their eventual extinction. But if it’s any consolation, in an electrified future the same fate awaits the traditional slushbox automatic — and eventually, most gearboxes with more than a single fixed gear ratio. This time, though, it’s not millennials to blame for not knowing how to use three pedals. This time it’s the electric motor doing what it does best: ruthless efficiency.
Most enthusiasts know that electric motors (or electric machines, as they are often referred to in engineering circles) produce a lot of torque at low speeds. This is true, of course, but I think the understanding often ends there. What does the torque and power curve of the motor look like, and why? What tricks might automakers do to stretch the limits of a single speed reduction? And when might a multi-gear transmission still be advantageous in an electrified future?
My goal with this article, and perhaps future series, is to demystify some of the quirks of EVs. The average car nerd knows the four strokes of the internal combustion auto cycle by heart: suck, squeeze, bang, and blow. But I suspect that the workings of Maxwell’s equations, which govern what we know about electromagnetism and how EVs move, are more of a mystery.
EVs are often dismissed as soulless appliances, but I don’t think that’s fair. Turning electrons into motion is a choreographed act — a symphony of transistors pulsing current into tightly wound copper coils, conjuring magnetic fields through thin air that tug a chunk of steel and magnets into instant motion. It’s anything but lifeless. Maybe, with a little more appreciation for this, the loss of our right to row our own gears will sting a little less.
[Editor’s Note: Everybody welcome Zero Entropy! He is an auto industry enginerd who is going to impart some of his technical wisdom in the form of regular technical deep-dives! If you have any EV-related topics you’d like him to tackle, please let us know in the comments! -DT].
Understanding the Torque-Speed Curve 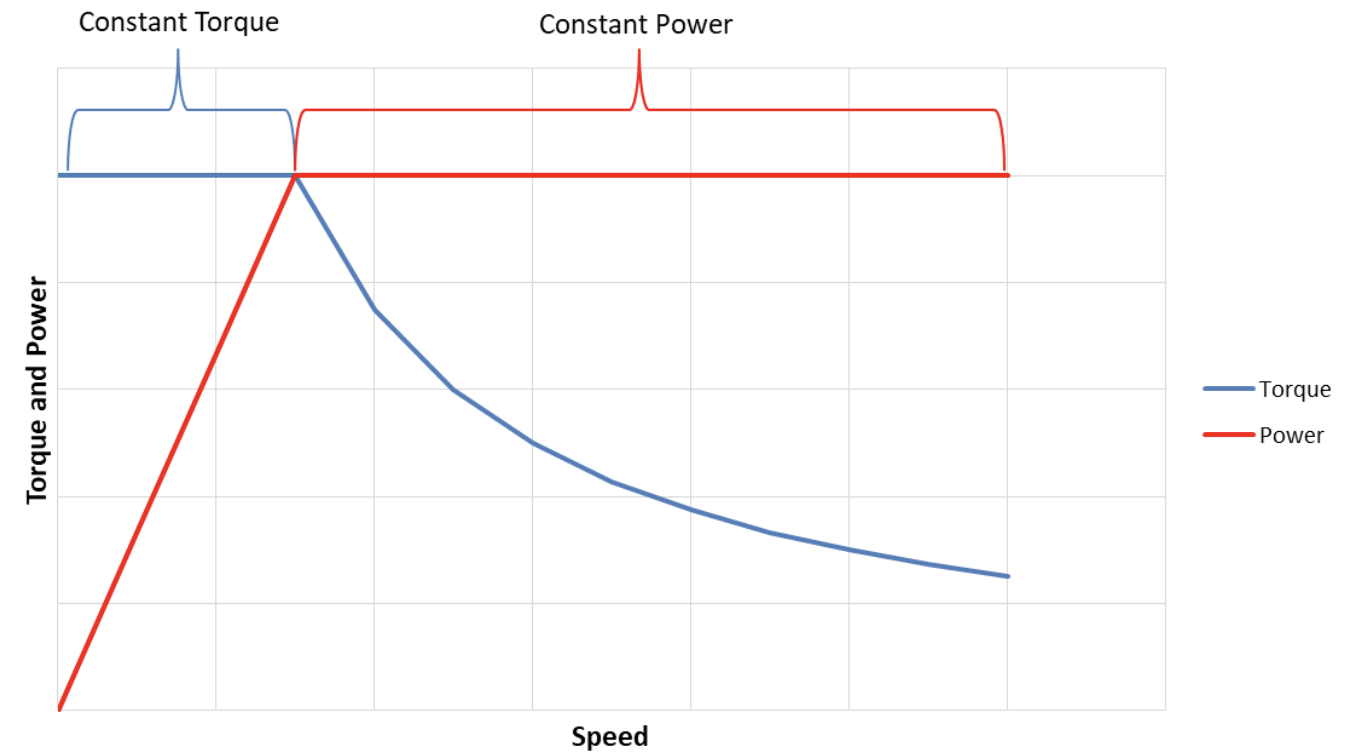
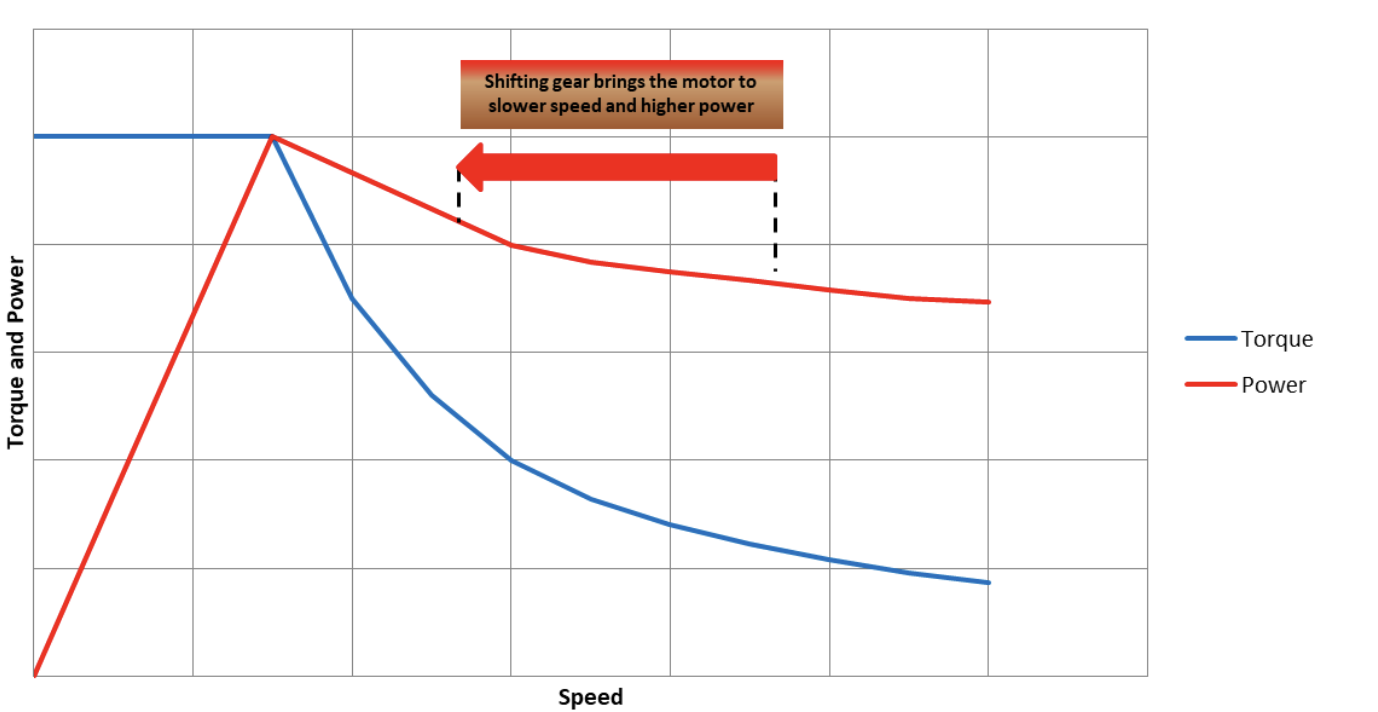
Appreciation for the electric motor should start with an understanding of the torque-speed curve. Most any type of motor found in an EV, be it induction, permanent magnet, wound field, or other will have a similar-shaped torque curve for the same fundamental reasons. Let’s dive into how that curve looks and why it behaves that way. We will use an interior permanent magnet motor as an example because it is the most common type of machine used in modern EVs and hybrids. The torque-speed curve can be divided into two sections: constant torque and constant power.
Constant Torque
If you’ve ever watched some of the viral EV acceleration videos, the ones with an unsuspecting grandma suddenly pinned back in her seat screaming, you know that the main performance aspect EVs excel at is making torque from a dig. It’s true that unlike the combustion engine, an electric machine can make all its rated torque from a stall.
At low to medium speeds, the torque is limited by the current flowing into the motor. The three-phase inverter (the power electronics box that feeds the motor) carefully controls the magnitude and phase of the sinusoidal currents flowing into each motor winding. Think of it like ignition or valve timing in an ICE — the current has to flow at exactly the right moment as the rotor spins.
As you might imagine, more current does equal more torque, but it comes with the same tradeoff every powertrain faces: heat. The inverter, cables, and windings all have some current limit, above which, bad things will happen and happen quickly. This heat does not go up proportionally with torque. The heat generated by a simple electrical resistor is defined by I^2*R (“I” being current, and “R” being the electrical resistance of said component). The squared term is the key here.
But what if we had really good cooling, you ask? Can we crank that Nissan Leaf to 11?! Well, sorry to burst your bubble, but even then, the motor hits an eventual plateau. The steel in the motor is only capable of so much magnetic flux density. When this “saturation” is reached, more current has dramatically diminishing returns. You end up making a heck of a lot more heat and not much more torque.
You might think that automakers, filled with warranty-obsessed bean counters, spec in a lot of safety margin into the peak current and torque limits of the powertrain. In actuality, the motor is usually designed fairly close to saturation levels. Those same bean counters want to get the most out of every bit of steel and copper they paid for. Careful monitoring prevents overheating. Sorry, tuners, there is not a lot of margin to boost your EV project here. EVs might be described by some as appliances, but they are not toasters.
In summary, the “constant torque” part of the torque-speed curve is limited by the current, thermal, and magnetic saturation limits of the motor and inverter system. To increase it costs real dollars: the motor gets larger, copper gets thicker, and cooling capacity increases. But overall performance is more than just low speed twist, what about high speed? To what speed can the system produce this torque, and why does it taper off? In the next sectio,n we will discuss the second part of the torque-speed curve.
Constant Power
Remember how I mentioned that the motor is often referred to as a “machine” in engineering circles? It’s a nod to the fact that the device can act as a generator, too. Understanding this is key to the second part of the torque-speed curve: the constant power region.
As the rotor spins, its magnets generate a voltage in the windings—thanks to Faraday’s law—that pushes back against the inverter’s voltage. We call this voltage back electromotive force or back EMF. It’s like trying to push water through a pump that is spinning the other way. The faster the pump spins, the higher the pressure opposing you is. In this case, the faster the motor spins, the higher this voltage gets. Eventually, the motor spins so fast that the back EMF equals the maximum voltage the inverter can apply (effectively the battery voltage in an EV).
When this speed is reached, the inverter can no longer push current into the motor. We are no longer limited by a maximum current, but rather limited by the voltage available from the battery and inverter at this speed.
The motor has hit a wall.
So how do we go faster? This is through some of the magic of modern controls in the inverter. This transition is referred to as the “Corner Point” on the torque-speed curve.
Beyond the Corner Point, the inverter is doing something called field weakening. Those permanent magnets spinning around in the rotor are producing magnetic flux, which is generating the back EMF that is in our way. To go faster, we need to reduce that flux and reduce the back EMF.
The inverter adjusts the phase (angle or timing of a camshaft lobe if you are thinking like an ICE) of the current so that it actually opposes the magnetic flux of the permanent magnets. Yes, we are using current to make the motor’s field weaker! We’re literally zapping the motor to make its magnets less magnetic. The result of this is lower back EMF, which allows faster speeds, but comes at the consequence of reduced torque.
This is why the torque speed curve looks the way it does.
The inverter can continue to field-weaken to faster and faster speeds. The torque will continue to drop. Power is torque times speed – so as torque falls and RPM climbs, the math works out neatly. The result is a broad, flat plateau of power delivery that feels like endless pull.
Electric motors have redlines too, based on mechanical limitations. The rotor will eventually fly apart at high enough speed from centrifugal forces! But their simplicity and compact design mean they can spin very fast relative to typical ICE found in everyday cars. Modern high-performance EVs are approaching 20,000 RPM. Even the Honda AP1 S2000 tachometer won’t suffice here.

This torque-speed story is why most EVs get away with a single gear. Between stump-pulling torque at zero RPM and that long, flat stretch of constant power to super high speed, there’s simply no need to shift. At any given speed the motor is capable of maximum torque OR maximum power. Shifting gears won’t change that.
Designing for Peak Performance
So is it that simple? There will never be a need for more than one gear?
Not so fast. Multispeed gear boxes won’t be totally dead in an electrified future, but I do think their application will be limited to special applications. Let’s dig into where there still might be life left.
First, we need to go back to high school physics to prove something that may be obvious to some of you: That horsepower is the ticket to quick acceleration. I promise you this won’t hurt that much. Just rearranging two equations to prove the point. First, Newton’s second law. Force is the product of mass and acceleration:
 Secondly, the definition of power is force times velocity:
Secondly, the definition of power is force times velocity:
If we do a little substitution, we get the following:
In a nutshell, acceleration is equal to power divided by mass times vehicle velocity. Put another way: for some given speed, the acceleration is maximized when the power is maximized. That wasn’t too bad, right?
Now let’s take that back to our torque-speed curve. This means that once we have gotten to a speed where the motor is in the constant power phase, the gear ratio no longer matters. Shifting gears won’t make it accelerate any quicker since the power is already maximized and constant!
At low speeds, however, gearing still matters. A lower gear (higher reduction) multiplies torque and lets the motor spin faster for a given road speed. Put the same as above, this means greater power is being produced for a given speed, and acceleration is greater.
So the gearing choice only really matters before you hit the Corner Point of the motor performance. In most commercial EVs, this usually happens around 30 to 40 MPH. After that, it’s all peak power.
But here’s the rub: the constant power phase of the torque speed curve isn’t actually so constant in the real world. I lied earlier. Like so many things in life, the reality isn’t the same as the idealized version on paper. Constant power isn’t usually constant.
The degree of drop off varies from motor to motor, but a more typical real-world torque speed curve may look something like this:
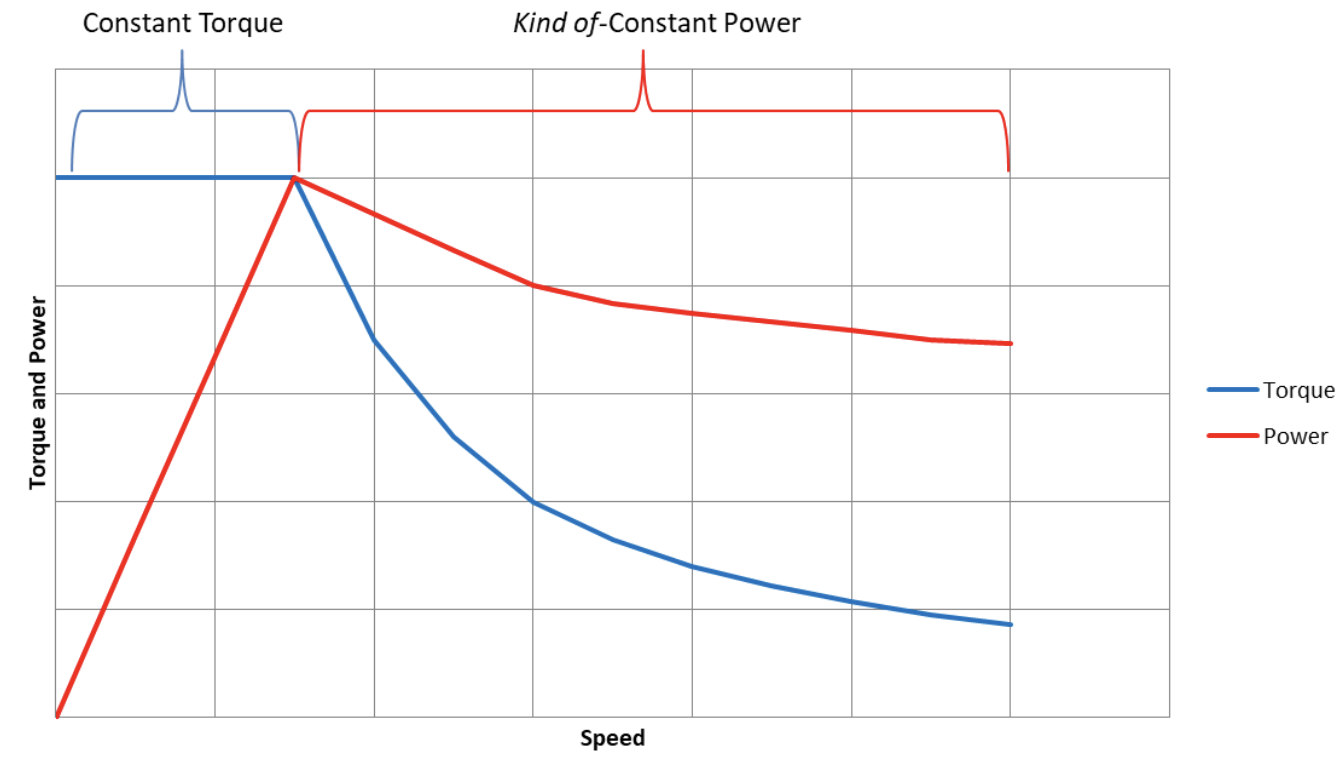
For most EVs, their power actually tapers off at higher speeds. This is due to something called power factor and imaginary power. Despite the name, it’s not make-believe. It’s a real phenomenon that has to do with inductance and reactive current. If you want to learn more about imaginary power and other wizardry, you’ll have to sign up for my advanced course. For now, you will just have to take my word on it.
If you’ve watched any of the viral YouTube videos of EVs drag racing some muscle car, you may observe a familiar pattern: The EV jumps out to a quick lead, but then as power tapers off, it gets slowly reeled in by the snarling muscle car. Who wins depends on how long the race is.
This is where a multi-speed gearbox can earn its keep. Shifting puts the motor back toward its sweet spot near that Corner Point where it makes peak power. This is part of the same reason an ICE car needs to shift, but just a lot more subtle because the power in the EV curve is still pretty high across the board compared to an ICE.
The best, and perhaps only example of this in a consumer vehicle, is the Porsche Taycan (and its Audi eTron GT sibling) with its two-speed gearbox. This is a high-performance vehicle, and the two-speed box helps keep the motor in a higher power operating condition, and it allows for some extremely high top speeds that may otherwise exceed the motor’s redline.
The other application I think we could see is some sort of multi-ratio gearbox in specialty off-road variants of vehicles.
We’ve established that EVs make tons of torque at zero or low speeds, so shouldn’t they be perfect for an off-road adventure through Moab? Yes, but the extreme cases still pose a challenge.
Imagine you are trekking over some boulders at an extremely steep angle. You’re inching over an obstacle, and the electric drive motors (presumably two or even four motors) are effectively twisting against gravity in a stall condition. They can make this torque, but heat can build quickly.
Using the motor to hold the car up an embankment is a lot like the first week you were learning to drive stick shift and you got caught in traffic on the steepest hill in town. Your poor clutch had to do the mediation between gravity on one side and an engine you are revving way too high on the other. I can still smell it.
Back to the EV; This is a case where a special crawl gear could be handy. Not because the motor isn’t capable of making the required wheel torque without it, but because it would run a lot cooler if it was geared down more. A greater reduction means the motor can be at a lower torque to make the same wheel torque. Lower torque means less current and less heat.
So in conclusion, while most EVs are perfectly happy with one ratio, there are still a few places — on racetracks and rock trails — where an extra gear or two can up the performance. Maybe the gearbox isn’t totally doomed after all.
A quick note about efficiency and economy: Yes, there is the small potential for a multi-speed gearbox to improve vehicle economy and put the motor in a more efficient operating condition, but any advantage typically isn’t worth the added cost and complexity of a gearbox like that, especially on an economy-focused EV. In general, the electric motor tends to be very efficient across the torque-speed range.
Cool Tricks Automakers Use Instead of Changing Gears
The single-speed transmission is adequate for most EVs as we’ve discussed, but it still has some disadvantages. Automakers have a few tricks up their sleeves to make up for it.
The first is to use different ratios for front and rear motors (in a dual motor AWD vehicle). The rear motor, for example, can be geared lower (greater reduction) to provide maximum acceleration off the line when the vehicle’s weight transfer is shifted most to the rear tires, giving them the most grip.
The front motor will be geared taller. As the vehicle gains speed and the rear motor crosses the Corner Point, its power will gradually drop off, but the front motor will be hitting its stride and is no longer grip limited at this speed. Overall power never fades.
The driver gets the benefit of two different ratios, each optimized for a different vehicle speed, all without shifting any gears!
But the most interesting trick might be what Kia is doing with the EV9. It has been reported that the EV9 has a motor that can switch the way the motor windings are configured on the fly.
Electric motors in EVs almost always have all three phases. Those three winding phases can be connected in two different ways: delta or wye. Illustrated below are the two configurations. The inverter will connect to the terminals A, B, and C and manage the rearrangement.

At low speeds, the motor is configured in wye mode, which generates a higher back EMF. This maximizes torque, but hits the Corner Point and is voltage-limited sooner. Switching to delta configuration lowers the back EMF at the terminals and allows higher speed before hitting its voltage limit. Changing between the two alters the torque-speed curve. It’s like having a two speed gearbox made from transistors, not gears. (See The Autopian’s deep-dive into Kia’s drive unit here).
It’s a reminder that while electric cars may have done away with overly complex mechanical gearboxes (engineering wonders in their own right), they haven’t killed ingenuity. Car people love complexity; carburetors, pushrods, turbochargers, and all the drama that comes with it. I think a lot of that love comes from seeing all these complex mechanical things in motion. With an EV, it’s a different dance that is more invisible, but one that I think is just as fascinating.
Top graphic images: BMW






Kia’s engineers had to have the EV9 switch to delta from wye, because if you hit 88 miles an hour in wye you’re going to see some serious shit!
Fascinating article. I thought physics was the easier side of math. I almost flunked out of calculus, because it was taught integration first and not derivatives. For me, at least, derivatives, with real world examples were so much easier to understand.
And I went from pre-med to photojournalism. Won an Emmy and still had a fun life. I did get straight A’s in chemistry, so maybe that’s how the early days as a still photographer worked out. Processing film, doing unkind things to Kodak Tri-X to shoot pictures on not brilliantly lit football fields. Carrying 70 pounds of gear on my shoulders and spine. After I transitioned to TV. In 1980.
My back and hands are paying me back now what they did for me then.
But, I got to see and do so much cool stuff in my life.
So, Zero Entropy, which I’m not sure exists. I love the name. But I am not a physicist. Prove me wrong.
V/I=futile
assimilate!
NEVER!
At least not till a new EV is a “stand alone entity”
A diabolical plan was hatched
Rudimentary eyes were attached
Surveying what was about and within
Privacy, consumer protections, are a sin
Control is debatable, but rest assured
When things go south, the responsibility is yours
Offering the promise of added safety
Insurers say; What have you done for us lately?
The checks and balances are absent
Public beta testing continues sans consent
Lulling the inattentive, distracted, into bliss
The Zombie Apocalypse
I was thinking recently about EVs and gearboxes, especially after reading up on the new Mercedes CLA EV with its 2speed and 12kWh/100km average consumption.
My i3s can do 12 in ideal weather over city and rural roads, but the moment you add highways, I’m at 18kWh/100km+.
And the vast majority of modern EVs are doing much worse, mainly because they literally weigh exactly two i3s (2.2-2.6 tonnes vs the BMW’s 1.3 tonnes, which roughly translates to around 21700 bananas, for our US friends out there).
I wonder if better motors, like Kia with its wye/delta configuration, axial flux motors using innovative materials, etc, will be the main driver in EV efficiency compared to 2speed gearboxes.
Btw cars like the Skoda Enyaq (VW MEB platform) use a permanent-magnet synchronous motor on the rear axle and an induction motor on the front, but that’s more performance and less efficiency minded.
There are differences in motors and inverters between the EV offerings available, but to be frank, the differences in efficiency are probably on the order of a few percent typically. Any permanent magnet machine used by a major automaker is going to be highly efficient.
Peak efficiency of a permanent magnet motor used in the industry is over 95%! There is not lots of room for improvement, at least not that would make a noticeable difference in range or economy to the end consumer.
IMO, vehicle design (size, weight, aero) all matter way more.
The exciting thing about axial flux is the high torque and power density of it. Consumers should not expect some breakthrough in economy or range from it though.
So the reason why the i3’s efficiency plummets above 100km/h speeds has basically way more to do with aerodynamics (plus cooling, battery tech and management and so on) than with the e-motor’s efficiency and its gearing? I assumed having a 2speed transmission in EVs is often the difference between usable and unusable highway speeds.
The again, the i3 has the aerodynamic profile of a large potato 🙂
Thank you for a really informative article for someone like me who has no background at all in electrical engineering or any engineering for that matter. It got technical but understandable to a person with a liberal arts background. Well done! I knew about the two speed Taycan and rumors that the Jeep Recon would have gears. Now I have a much better understanding as to why. The part on the KIA motor was also very interesting. I’d like a general article on the progress in EV motor design over the past few years and ideas on where in may go.
Appreciate the feedback. Striking a balance so everyone gets something out of it was my goal.
But… what about me?
lets_get_you_to_bed_grandma(meme).jpg
Incredible. This is like half the literature review of my PhD compressed into one fantastic article. And I learned something new! (Y and Delta in the Kia) Absolutely stupendous job!
That’s high praise, thank you, Kevin.
I’m certainly hoping for more articles!
P.S. Something that may interest you, the Dongfeng ER30 (based on the 4th gen Nissan Micra) is a factory-built EV from a major Chinese brand with three pedals and a five speed. Some cars even support battery swapping! Probably the only EV in history to have hot-swap batteries and a stick at the same time.
Ohhhh, interesting! I will check that out.
I would LOVE to hear more about ev innovation in China.
Not specifically bc it is happening IN China. Rather that just happens to be where there are more automotive companies experimenting with evs than the rest of the planet combined!